Sale

دانلود کتاب کنترل تطبیقی با عملکرد بالای سیستمهای دورکاری ۲۰۲۳ (High-Performance Adaptive Control of Teleoperation Systems 2023) با لینک مستقیم و فرمت pdf (پی دی اف)
| نویسنده |
Di-Hua Zhai, Yuanqing Xia |
|---|

۳۰ هزار تومان تخفیف با کد «OFF30» برای اولین خرید
| سال انتشار |
2023 |
|---|---|
| زبان |
English |
| تعداد صفحهها |
313 |
| نوع فایل |
|
| حجم |
46.6MB |
🏷️ 200,000 تومان قیمت اصلی: 200,000 تومان بود.129,000 تومانقیمت فعلی: 129,000 تومان.
🏷️
378,000 تومان
قیمت اصلی: ۳۷۸٬۰۰۰ تومان بود.
298,000 تومان
قیمت فعلی: ۲۹۸٬۰۰۰ تومان.
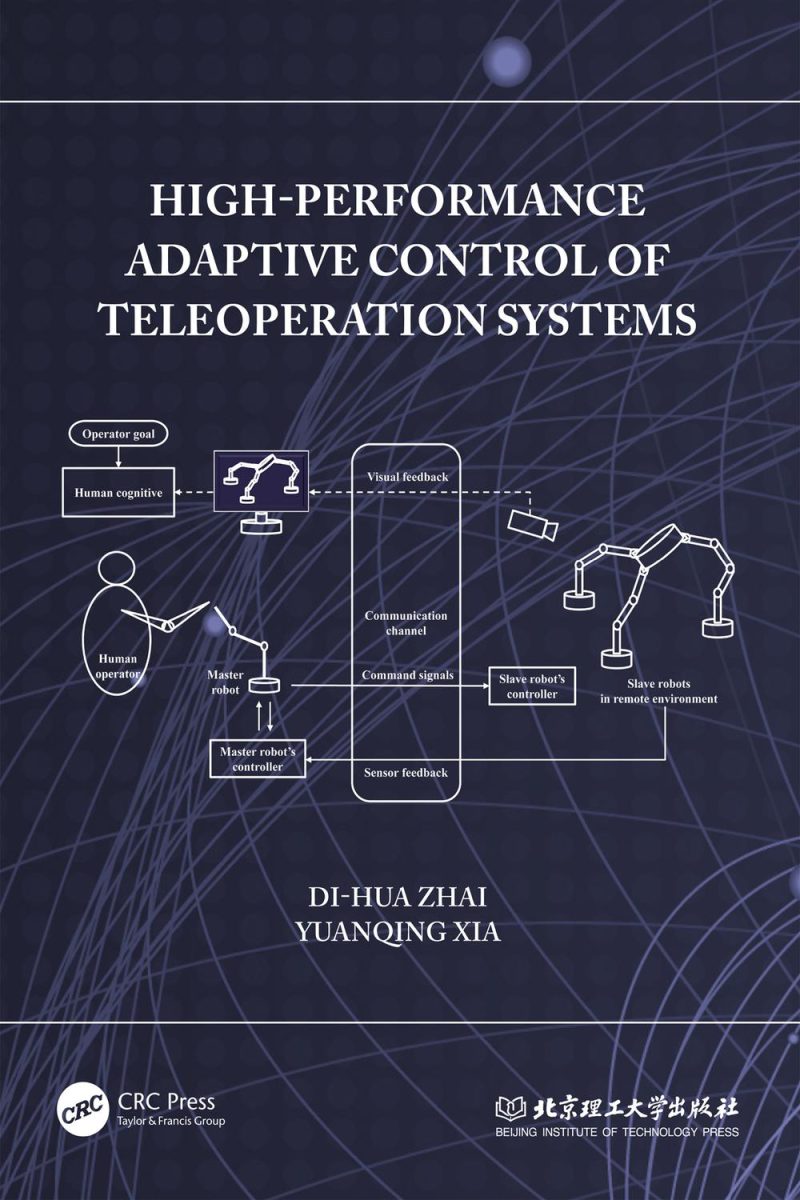
کتاب با معرفی مفاهیم و چالشهای سیستمهای تلهاپریشن شبکهای آغاز میشود. سپس، یک چارچوب کنترلی تطبیقی جدید، بر اساس فیلترهای سوئیچینگ کمکی، برای سیستمهای تلهاپریشن دوطرفه به منظور مقابله با عدم قطعیت مدل و نیروهای خارجی غیرمنفعل مورد بررسی قرار میگیرد. برای غلبه بر محدودیتهای ورودی سیستمهای رباتیک، این روش تطبیقی به حالت کنترل تطبیقی ضد باد نیز گسترش داده شده است. علاوه بر این، برای اعمال در سناریوهای همکاری از راه دور چند ربات و تلهاپریشن ناهمگن، دو روش تلههماهنگی و یک روش کنترل نیمه خودمختار تطبیقی به ترتیب توسعه یافتهاند. در نهایت، نویسندگان دو طرح کنترلی با زمان محدود و دو نوع کنترل بهبود یافته با عملکرد از پیش تعیین شده را برای سیستمهای تلهاپریشن بررسی میکنند تا عملکرد هماهنگسازی در حالت گذرا و حالت پایدار بهبود یابد.
این عنوان، مرجعی ضروری برای محققان و مهندسان علاقهمند به تلهاپریشن، سیستمهای رباتیک و سیستمهای کنترل غیرخطی خواهد بود. همچنین برای دانشجویان تحصیلات تکمیلی در رشتههای علوم، مهندسی و علوم کامپیوتر مفید خواهد بود.
۱. صفحه روی جلد
۲. صفحه عنوان فرعی
۳. صفحه عنوان
۴. صفحه حق تکثیر
۵. صفحه تقدیم
۶. فهرست مطالب
۷. پیشگفتار
۸. بخش اول: مقدمات
۹. بخش دوم: تلهآپریشِن تک-استاد تک-برده
۱۰. بخش سوم: تلهآپریشِن چند-استاد چند-برده
۱۱. بخش چهارم: تلهآپریشِن ناهمگن
۱۲. بخش پنجم: تلهآپریشِن با زمان محدود
۱۳. بخش ششم: تلهآپریشِن با عملکرد از پیش تعیینشده
Within a unified switched-control framework, this book investigates the high-performance control designs and theoretic analyses for teleoperation systems, including the joint space and task space teleoperations, the homogeneous and heterogeneous teleoperations, and the single-master single-slave and multi-master multi-slave teleoperations.
The book begins with an introduction to the concepts and challenges of networked teleoperation systems. Then, it investigates a new adaptive control framework based on auxiliary switched filters for the bilateral teleoperation systems to handle the model uncertainty and non-passive external forces. To overcome the input constraints of robotic systems, this adaptive method is also extended to the anti-windup adaptive control case. Furthermore, to apply to multi-robot remote collaboration scenarios and heterogeneous teleoperations, two tele-coordination methods and an adaptive semi-autonomous control method are respectively developed. Finally, the authors examine two finite-time control schemes and two types of improved prescribed performance controls for teleoperation systems to improve the transient-state and steady-state synchronization performances.
This title will be an essential reference for researchers and engineers interested in teleoperation, robotic systems, and nonlinear control systems. It would also prove useful to graduate students in the fields of science, engineering, and computer science.
1. Cover Page
2. Half-Title Page
3. Title Page
4. Copyright Page
5. Dedication Page
6. Contents
7. Preface
8. Section I Preliminaries
9. Section II Single-Master Single-Slave Teleoperation
10. Section III Multi-Master Multi-Slave Teleoperation
11. Section IV Heterogeneous Teleoperation
12. Section V Finite-time Teleoperation
13. Section VI Prescribed-performance Teleoperation
✨ ضمانت تجربه خوب مطالعه
در صورت مشکل، مبلغ پرداختی بازگردانده می شود.
دانلود فایل کتاب با سرعت بالا
دانلود مستقیم به همراه ارسال فایل به ایمیل.
با چت آنلاین و پیامرسان ها پاسخگو هستیم.
کتاب ها را از منابع معتیر انتخاب می کنیم.